��ú�V�������a(ch��n)�^���У����F(xi��n)����r�O(ji��n)�yʮ�ֱ�Ҫ����(sh��)�F(xi��n)���бO(ji��n)���dz�ְl(f��)�]�O(ji��n)�y�O(sh��)������#�õķ�ʽ��Ŀǰ�҇��ľ����ıO(ji��n)��ϵ�y(t��ng)�Ƿ�ɢ�M(j��n)�еģ��քe����ͬ��ϵ�y(t��ng)�M(j��n)�бO(ji��n)�أ�������(g��)ϵ�y(t��ng)֮�g�O(sh��)Ӌ(j��)�ļ������ܲ��ϵ�y(t��ng)�o�����ݵ���r�£��͟o����(sh��)�F(xi��n)ϵ�y(t��ng)֮�g�Ļ���ͨ�ţ����h(yu��n)�̱O(ji��n)�ظ��ӟo����(sh��)�F(xi��n)����ˣ��ڱ����O(sh��)Ӌ(j��)��ϵ�y(t��ng)�Ќ����ü������܃�(y��u)Խ�ķ�����
1 ϵ�y(t��ng)�����O(sh��)Ӌ(j��)
1.1 ��(sh��)��(j��)�ęz�y
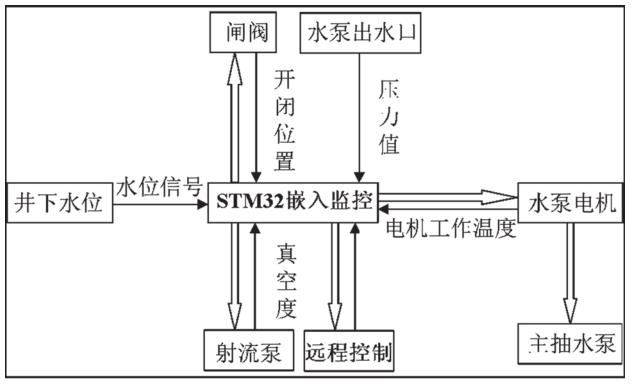
�η��mҺλ׃�����h(yu��n)�̱O(ji��n)�yϵ�y(t��ng)��Ҫ��ɵ��nj����³�ˮ���M(j��n)�п��Ɔ�ͣ���������������Ҫ����(j��)�F(xi��n)���Ļ�����(sh��)��(j��)�M(j��n)�У���Ҫ�z�y�Ĕ�(sh��)��(j��)�����(q��)��(d��ng)ˮ�õĮ���늙C(j��)������ˮ�}ˮλ��ˮ�õij��ډ����Լ�ˮ���M(j��n)ˮ�ڵ���ն���r��ᘌ��@Щ�������ęz�y����Ҫ�x�ò�ͬ�ęz�y�x�������IJ����K��� PT100 �M(j��n)��늙C(j��)�ضȵęz�y������ GUY Һλ��������ˮλ�M(j��n)�Йz�y������ PTP ϵ�еĉ���׃����ˮ�õij��ډ����Լ������̎����ն��M(j��n)�Йz�y�����(q��)��(d��ng)ˮ�õ�늙C(j��)������B(t��i)�������ù�����B(t��i)�ęz�y��ͨ�^������^�����ݔ���|�c(di��n)��(d��ng)����r�M(j��n)���Дࡣ
1.2 ϵ�y(t��ng)���Ʒ�ʽ
��1���ք�(d��ng)���Ʒ�ʽ��������ϵ�y(t��ng)�����ھo����r��(sh��)�F(xi��n)�ք�(d��ng)���ƣ��ھ�����ˮ�÷����b����(y��ng)�Ŀ�������ͨ�^�ք�(d��ng)�ķ�ʽ����늱õĆ�ͣ��
��2�����Ԅ�(d��ng)���Ʒ�ʽ�����Ԅ�(d��ng)���Ʒ�ʽ��ָ���h(yu��n)�̱O(ji��n)�yϵ�y(t��ng)����(j��)�F(xi��n)���z�y��(sh��)��(j��)�Д�늱��Ƿ���Ҫ��ͣ��ͨ�^�F(xi��n)��ͨ
�ŵķ�ʽ֪ͨ�F(xi��n)�����F(xi��n)�������ˆT�M(j��n)���ք�(d��ng)�ķ�ʽ��ˮ���M(j��n)�І�ͣ���ơ�
��3���Ԅ�(d��ng)���Ʒ�ʽ���Ԅ�(d��ng)���Ʒ�ʽ��ϵ�y(t��ng)����(j��)�z�y���ĬF(xi��n)��ˮλ��r�Լ��O(sh��)����\(y��n)�Р�r���Ԅ�(d��ng)�Д��Ƿ���Ҫ�M(j��n)��ˮ�õĆ�ͣ���ƣ������Ԅ�(d��ng)��Ɍ�ˮ�õĆ�ͣ������
2 ���Ʋ��Ե��O(sh��)Ӌ(j��)
2.1 ˮ�õĆ���(d��ng)
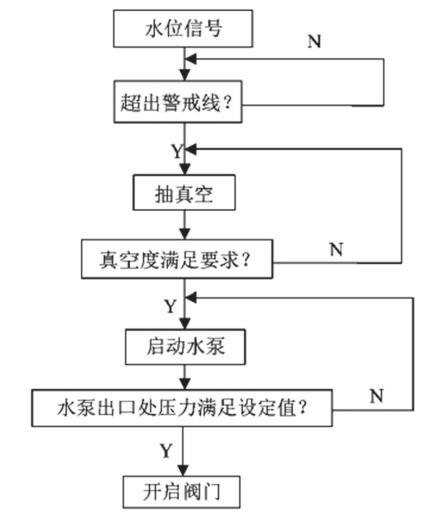
��ú�V�ճ��\(y��n)���У�ˮ�}��ˮλ��Ҫ�M���O(sh��)���İ�ȫ��(bi��o)��(zh��n)����(d��ng)ˮλ���ژ�(bi��o)��(zh��n)�r(sh��)����Ҫ����ˮ���M(j��n)����ˮ���I(y��)����ˮλ�߶ȵ��Д���ͨ�^ˮ�}���b��ˮλ�������M(j��n)�Ќ�(sh��)�r(sh��)�z�y�ģ�ͨ�^����(sh��)�r(sh��)�O(ji��n)�y��(sh��)��(j��)�c�O(sh��)���ą�����ȫֵ�M(j��n)�б��^������(j��)���^�Y(ji��)����ˮ����Ɇ�ͣ���ơ�����z�y��ˮλ�߶ȸ����O(sh��)���ĸ߶ȣ�����Ҫ����ˮ���M(j��n)����ˮ���I(y��)����(d��ng)ϵ�y(t��ng)���յ�����(y��ng)��Ϣ�Ժ���������(y��ng)��ָ�����ˮ�õĆ�ͣ����(d��ng)��Ҫ����(d��ng)ˮ�õĕr(sh��)��ϵ�y(t��ng)ͨ�^�^�������늙C(j��)����(d��ng)��늙C(j��)����(d��ng)ˮ�ù�������(d��ng)ˮ�ó��ڵĉ�������һ����(sh��)ֵ�r(sh��)ֹͣ��
2.2 ˮ�õ��\(y��n)��
������������׃�����z�y����̖ͨ�^ STM32 ���ư��ݔ?sh��)��h(yu��n)�̱O(ji��n)��ϵ�y(t��ng)��ϵ�y(t��ng)����(j��)���յĔ�(sh��)��(j��)�c�O(sh��)��ֵ�M(j��n)�б��^����(d��ng)�_(d��)������(d��ng)ˮ�õ�Ҫ��ĕr(sh��)�͕�(hu��)��ͨˮ�ÿ����y����Ɍ�ˮ�õĆ���(d��ng)���ƣ�ͬ�r(sh��)�P(gu��n)�]�����á���ˮ�ù�����ͬ�r(sh��)����Ҫ���ø��N��������ˮ�õĹ�����B(t��i)�C(j��)�M(j��n)�Йz�y����Ҫ�z�y�Ĕ�(sh��)��(j��)����늙C(j��)�\(y��n)��������ó��ډ���������ڵ���ն��Լ���ݔ���ܵ���ˮ�����Ȕ�(sh��)��(j��)��ͨ�^�@Щ��(sh��)��(j��)�Լ���(sh��)��(j��)��׃����r���h(yu��n)�̿���ϵ�y(t��ng)��(hu��)�Д��ˮ�õ��\(y��n)�Р�r��
2.3 ˮ�õ�ֹͣ
ͨ�^�h(yu��n)�̿���ˮ���\(y��n)�У�ˮ�Ì�����ˮ�}ˮ�ų��^���У�ˮ�}ˮλ�������½����˕r(sh��)��ˮλ��������(sh��)�r(sh��)�O(ji��n)�y��(sh��)��(j��)���M(j��n)�����ϵ�y(t��ng)����Ӌ(j��)�㣬��(d��ng)ˮλ�_(d��)����ȫˮλ���r(sh��)��ϵ�y(t��ng)��(hu��)����ˮ��ֹͣ��������(d��ng)ϵ�y(t��ng)�l(f��)���P(gu��n)�C(j��)��̖�Ժ���(y��ng)��늴��y��(hu��)��ɓQ���P(gu��n)�]���l�y�����P(gu��n)�]ˮ�õ��^���У�ˮ�ó���̎�ĉ�����(hu��)�^�m(x��)����ֱ���l�y�P(gu��n)�]�صמ�ֹ��ͬ�r(sh��)��ϵ�y(t��ng)�l(f��)����̖�����Ƴ��_�|�c(di��n)��(d��ng)����ʹˮ��ͣ�C(j��)��
3 �η��mҺλ׃���������O(sh��)Ӌ(j��)
3.1 ˮ�ü�ˮ·�O(sh��)Ӌ(j��)
���Ćη��mҺλ׃����ϵ�y(t��ng)�У��������� 5 ��(g��)����ˮ�ã�������r��ֻ�Ѓɂ�(g��)�M(j��n)����ˮ���I(y��)����(d��ng)�@���_(t��i)�l(f��)�����ϕr(sh��)����ˮλ�^�ߵĕr(sh��)�͕�(hu��)����������_(t��i)����ˮ�ã���(d��ng)��Ҫ��ˮ���M(j��n)�Йz�ޕr(sh��)����(d��ng)ʣ��� 1 �_(t��i)���ñá��ڴ�ͬ�r(sh��)�����������ˮ��Ч����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�� 3 �M��ˮ�ܵ���
3.2 �αÆ�ͣ����
���O(sh��)Ӌ(j��)��ʹ�õľ���ˮ�����x�ıã��ڌ����M(j��n)�І���(d��ng)�ĕr(sh��)���Ѓɂ�(g��)��Ҫ���}��Ҫ�M(j��n)���P(gu��n)ע �����£���Ҫ���Ƴ�ˮ�ܵ��ϵ��y�T�����]�ϣ��ڶ���ˮ�ó�ˮ��̎����ՠ�B(t��i)������Ҫ�M(j��n)��ͣ�C(j��)�r(sh��)����Ҫ����y�T���P(gu��n)�]���M(j��n)���P(gu��n)�]ˮ�õIJ������@����?y��n)����ֱ�ӿ���ˮ��ͣ�C(j��)����(hu��)�a(ch��n)��“����”�����ΰl(f��)�����@��ˮ�õ�ʹ��������ɺܴ��Ӱ푡����ԣ���ͣ�C(j��)�ĕr(sh��)����Ҫ�����x���M(j��n)���Д࣬��(d��ng)ˮ����ˮ�ڵ�ؓ(f��)��Ӌ(j��)�z�y����(d��ng)ǰ����ՠ�B(t��i)�����҉������@ʾ�ó��ډ���������
�ӵ���r�£����܌�ˮ���M(j��n)��ͣ�C(j��)������
3.3 ˮ�ýM����(d��ng)����
��D 3 ��ʾ�鱾ϵ�y(t��ng)�O(sh��)Ӌ(j��)��ˮ�ýMʾ��D�����Կ�����ϵ�y(t��ng)���� 5 �_(t��i)������ˮ�ã����Ѓ��_(t��i)�鹤��ˮ�ã����_(t��i)����ˮ�ã�����һ�_(t��i)��z��ˮ�á��ڹܵ����ڵĵط����b�l�y����ú�V����ˮ�}�И�(bi��o)ע���ėlˮλ����ˮλ�ɵ��߷քe��ˮλ��ˮλ 2��ˮλ 3��ˮλ 4���η��mҺλ׃��������ϵ�y(t��ng)����(j��)ˮ�}ˮλ�������z�y���ĬF(xi��n)��ˮλ��r��ˮ�õĆ�ͣ�M(j��n)�п��ơ�
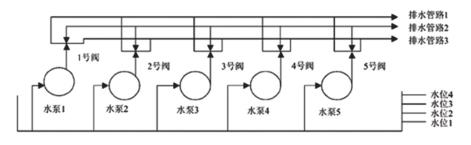
��(d��ng)�η��mҺλ׃����ϵ�y(t��ng)�z�y����(d��ng)ǰˮλλ��ˮλ 1 ����ˮλ 2�����֮�g�ĕr(sh��)����Ҫ����(d��ng)ˮ�á���(d��ng)ˮλ�_(d��)���˘�(bi��o)ӛ 2�͘�(bi��o)ӛ 3 ֮�g�ĕr(sh��)������(d��ng)ǰ��ˮλ��B(t��i)�ǵ;���ֵ���h(yu��n)�̿���ϵ�y(t��ng)����(j��)��(d��ng)ǰ��B(t��i)�����ڵĕr(sh��)�g�Ό�ˮ���M(j��n)�І�ͣ���ƣ���(d��ng)�˕r(sh��)̎����늸߷��ڣ���ô������(d��ng)ˮ�ã�����˕r(sh��)̎������^�ٵĕr(sh��)�g�Σ���ô��Ҫ�� 1 �_(t��i)����ˮ���M(j��n)�І���(d��ng)���� ������Д�ˮλ�ژ�(bi��o)ӛ 3 ����(bi��o)ӛ 4 ֮�g�ĕr(sh��)�����˕r(sh��)ˮλ̎���жȾ����B(t��i)����Ҫ�� 1 �_(t��i)ˮ���M(j��n)�І���(d��ng)���� ����(d��ng)ˮλ̎�ژ�(bi��o)ӛ 4 �����ϵ���r�r(sh��)�������˕r(sh��)��ˮλ̎�ڸ߾���Ġ�B(t��i)�£���Ҫ�������ك��_(t��i)ˮ���M(j��n)�І���(d��ng)��
4 �Y(ji��)�Z
���ķ����ˬF(xi��n)�ھ�����ˮ�Ĺ���Ҫ�����c(di��n)���O(sh��)Ӌ(j��)��һ�N�܉��h(yu��n)�̱O(ji��n)�ص�
�η��mҺλ׃����ϵ�y(t��ng)�������� STM32 ��Ƭ�C(j��)�_�l(f��)��Ƕ��ʽ���g(sh��)������(j��)��ˮ�}ˮλ�z�y��(sh��)��(j��)���ƶ�������(y��ng)�Ćαü��ýM��ͣ������������Ҫ�Y(ji��)Փ���� ��
��1���_�l(f��)�� STM32 ��Ƭ�C(j��)����ϵ�y(t��ng)�������¸�ˮ�}�z�y��ˮλ��r�M(j��n)�з����Д࣬����(j��)�Д�Y(ji��)�����ƱÆ�ͣ�Ĕ�(sh��)�������^�m(x��)�z�y��(sh��)�r(sh��)�z�yˮλ��r��ѭ�h(hu��n)����ˮλ�Д࣬�����ýM�Ć�ͣ�M(j��n)�п��ƣ�ԓϵ�y(t��ng)�ɿ��Ըߡ���(w��n)���Ժã��܉�?q��)��F(xi��n)ú�V����ˮ�õ��Ԅ�(d��ng)���ƣ���(sh��)�F(xi��n)�÷��ğo�����I(y��)��
��2�������O(sh��)Ӌ(j��)��ú�V���η��mҺλ׃�����O(ji��n)��ϵ�y(t��ng)��(y��u)���˾��±ýM�Ć�ͣ�����㷨��������ϵ�y(t��ng)�Y(ji��)��(g��u)�M���Լ��O(sh��)��İ��b�y���ϵõ��˸��ƣ����M(j��n)һ�������ˌ�ˮ�ÙC(j��)�M��B(t��i)�ęz�y��������\(y��n)�бO(ji��n)�y�ľ��ȡ�
ע���������x�����¾���ԭ��(chu��ng)���D(zhu��n)�dՈ��(bi��o)�����ĵ�ַ