ժ Ҫ �����ܱO(ji��n)��ϵ�y(t��ng)������o�҇��Ԅӻ��������I(y��)�����˱���ĸ���������б�Ҫ��Ͷ��ʽҺλӋ���OӋ�M���Mһ���о���ᘌ�Ŀǰ���Ƚg��ʽ���ബ�Ԅӻ�ˮƽ�^�͵���r�������һ�N���� PLC �F(xi��n)���W�j��Ͷ��ʽҺλӋ��ԓ�ľͽg��ʽ���ബ�O(ji��n)�������M����������������g��ʽ���ബ�O(ji��n)�ص�Ӳ���OӋ��ܛ���OӋ�M����̽����ԓ�ľ���һ���ą����rֵ��
1 �g��ʽ���ബ�O(ji��n)������
Ŀǰ�҇���������У��ԇ��a���������ബ���������������͡��\�гɱ��ߣ��o���M�㽭�Ӻ������ٹ��̵���Ҫ�������OӋ�����켼�gˮƽ�����ڇ�����f߀���^��δ������ˆT���@ƫ�ֱ࣬��Ӱ������ബ���\�С��S�o�Լ���������˲����Ƚ�����ബ���g�e�����ബ�ԄӱO(ji��n)�ؼ��g��������ബ�����������Ǯ�ǰ�����迣���о�����Ҫ�n�}�����ԓ�������һ�N���� PLC �F(xi��n)���W�j��
Ͷ��ʽҺλӋ���g��ʽ���ബ�ıO(ji��n)�ز�����Ҫ���������o䓘������_܇�Ƅӡ����w�M�ơ��g���ܵ��������g����ͣ���{�١���õĆ�ͣ���{�ٵȲ��������ⰲ�b�������������ڱO(ji��n)��ϵ�y(t��ng)�Ĺ�����r�c�a�������w�A�ȶȡ��g����ˮ��Ⱥ��D�١��g���������ء����w��λ�ǡ����w�\�о��x���g܇Ť�ء����{��Ⱥ��������x���迣�õ���նȺ͉��������Ͱl(f��)�әC���\�Р�r�ȡ�
1.1 �O(ji��n)�y����
��1�����w�ƄӲ�����Ҫ��Ҫ�O(ji��n)�y�����w�װ���L�� Ld�����w�װ�Č��� W���Ľg�����S�����^λ�õ��L�� S���g���������w�ĽǶ� α�����w�ķ�λ�� β������׃�����y�õ�ˮ�� H1��H2��H3 �Լ���λ Td��
��2���迣���I(y��)������Ҫ��Ҫ�O(ji��n)�y ����ɳ�Įa�������{��������ԭ�������w�e��ȵȡ�
��3����ϵ�y(t��ng)߀��Ҫ�O(ji��n)�y�ą��������g�����������غ��D�١��x���迣�õ���նȼ��䉺����С�����͙C���D�ٺ͜ضȵ���Ҫ�\�Ѕ�����
1.2 ���ƌ���
��1�����w�ƄӲ��֡�ǰ�M���[���Ǵ��w�M���Ƅӵ���Ҫ��ʽ�����У�ǰ�M��Ҫ��ͨ�^�_܇���Ƅ��Լ����o䓘�������ό��F(xi��n)�ġ����У����w�Ĕ[����r��Ҫ�ͽg����λ�ô��ںܴ���Pϵ�����w�[�ӕr����Ҫ�g������һ����܉�E���@�Ӳ��܉����Ӵ��w���迣���������w�ķ�λ�� β �c�g����ˮ����� Dc�ǛQ���g��λ�õ���Ҫ������һ����r�£����ô��з�λ�ǂ���������ԫ@ȡ���w��λ�� β �ľ��wֵ�����g������ˮ��� Dc�ɵ����L��Lc�ͽǶȂ������y���Ľg���������w�ĽǶ�αӋ������ɵõ���
Ȼ�����ڌ��H�l���£����w����̎�ڐ��ӡ����s�ĭh(hu��n)���У�ˮ�ϵ��L�˕r���������w�ăA�ȡ����ԣ��ڴ_���g����ˮ��ȵĕr�ò����]���w�ăA����r�����˵õ����w�ăA�ȶȣ�ԓ�O(ji��n)��ϵ�y(t��ng)�ڴ��w�װ��3����cλ�÷քe���b��3��100 mmˮ���ĉ���׃���������У��@ 3 ������׃������ 2 �����b�ڴ��^λ�ã���һ�����b�ڴ�β̎����y�õ�ˮ��քe�� H1��H2��H3���@�ӾͿ��Եõ��g����ˮ��� Dc ��Ӌ��ʽ ��
���w�װ���L�� Ld�����w�װ�Č��� W���Ľg�����S�����^λ�õ��L�� S ��Ҫ�������ϵ�y(t��ng)���g���������w�ĽǶ� α�����w�ķ�λ�� β �Լ� 3 ������׃�����y�õ�ˮ�� H1��H2��H3�y�ú��������̖������λ�C�M��̎����ͨ�^�����υ�����Ӌ��ͷ�������Եó��g����ˮ����� Dc��
���⣬Ҳ���ܺ�ҕ����λ Td �Ĝy�����ڜy�ó�λ Td �Ժ����c�g����ˮ��� Dc �Լ����w�ķ�λ�� β (li��n)�Ϸ�������Եó��g���Č��r܉�E�����ڴ˻��A���c����ݔ��ĺӴ�ԭ�����Y�Ͽ��]�c�������Ϳɜʴ_�����^�،��迣�ľ��Ⱥ�Ч���M���u����
��2���迣���I(y��)���֡������迣���I(y��)���ԣ���ɳ�Įa�������{�������Լ�ԭ�������w�e��ȵȶ�����Ҫ�M�бO(ji��n)�y����Ҫ���������У���ɳ�Įa�����迣�r�g���������{��������ԭ�������w�e����Լ��F(xi��n)���y���õ��Ě���ʴ���ֱ���P(li��n)�����{����������������Ӌ�M�Мy���@�á�ԭ�������w�e��������{�ܵ��ϵ��ܶ�Ӌ����ֱ�ӷ��������υ���ͨ�^��������ݔ��Ɍ���Ϣ������ PLC ����λ�C�ϡ���ͨ�^Ӌ��C�ķ����c̎�����܉�õ��a�����������ң�ԭ�������w�e��Ⱥ����{���������܉��L�ƳɌ��r������
��3����ֱ��늙C�У��g������������ Mc ��늙C����� I �dz����ȵģ�Ҳ���� ��
Mc=kI ��2��
ʽ�У�k ��늙C���������ԣ�ֻ��Ҫ�y��늙C�����ɵó��g���������صĴ�С���g�����D��ͨ���������D�ق������y���õ��ġ��x���迣�õ���ն��c��������������ϵ���նȺ͉���׃�����y���õ��ġ����͙C���D�ٺ͜ضȵ���Ҫ�\�Ѕ���Ҳ�քe�������Ă������y���@ȡ���@Щ�y���õ�����̖���������� PLC�������þW�j������λ�C�M�з�����̎�����@�ӱ���Ԍ����{�Įa���M����Ч���ơ�
2 �g��ʽ���ബ�O(ji��n)���OӋ
2.1 Ӳ���Y��
�˱O(ji��n)��ϵ�y(t��ng)��Ҫ���OӋ���ϡ���λ�C�Y���������I(y��)�F(xi��n)���O���� 2 �� PLC ��վ�M�ЬF(xi��n)���O(ji��n)�y���F(xi��n)�رO(ji��n)�yϵ�y(t��ng)�܉��M�Д����ɼ��������߉�Д��Լ�ݔ���΄յĿ��Ƶȹ������܉�քe�����w���Ƅ���r���迣����r�M�бO(ji��n)����ϵ�y(t��ng)�е�ÿһ����վ���O�Þ�ģ�K���Y���ԑ�����ͬ���r����Ҫ����λ�C���h�̷��չ�������Ҫ���ßo�� Modem �M����Ϣ���f�͜�ͨ��
2.2 ܛ���OӋ
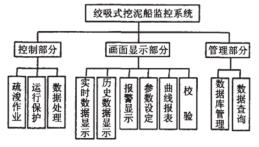
��λ�C��Ҫ��ͨ�^ VB6.0 �����ıO(ji��n)�س������ 2 �� PLC��վ֮�g���� Controller Link �M����P(li��n)���O(ji��n)��ϵ�y(t��ng)������CX-Prgrammer ������@ʾ���O(ji��n)�ء��S�o�c�{ԇ�������F(xi��n)�ˏĔ����ɼ���������̎���c�@ʾ�Ĺ��ܡ��D 1 �o����Ͷ��ʽҺλӋ��ܛ���OӋ��r��
3 ��λ�C�O(ji��n)�س����ܽ���
��λ�C�܉��@ʾ�迣���I(y��)�^���漰�Ľg����ȡ����w�A�ȶȡ����w��λ�ǡ��[�ǡ��g���ܽǶȵ���Ҫ�������܉��S�r������늙C���\�Р�B(t��i)���܉��x�����ബ�քӲ������ԄӲ�����ʽ���܉������O�������h(hu��n)���l���ʹ��w�Y���������܉��L�Ʈa���������@ʾ�g�����\��܉�E��߀�܌��迣�ľ���Ч���M�з���̎����
4 �Y�Z
���ܿ���ϵ�y(t��ng)���ܵ����������҇��Ԅӻ��������I(y��)�ṩ��
��ı�ݣ��ṩ����(y��u)�|�ķ��ա�
ע���������x�����¾���ԭ��(chu��ng)���D�dՈ�������ĵ�ַ